関東道路メンテナンスセンターの「技術力向上セッション」にて
当社技術を紹介
2026.3.10
2026年3月3日(火)、関東地方整備局 関東道路メンテナンスセンターにおいて「技術力向上セッション」が開催されました。当日は、株式会社エイト日本技術開発(EJEC)ファノベイトラボのメンバーが、開発した最新の点検ロボット技術やDX技術の紹介を行いました。 本セッションは、インフラメンテナンス分野におけるDX技術の導入・活用を推進する同センターとの連携強化および技術情報の交換を目的としたものです。 当日は、以下のテーマについて実例を交えながら説明しました。セッション後には活発な質疑応答が行われ、現場の課題や今後の技術活用の可能性について、意見交換する貴重な場となりました。
| テーマ | 内容 |
|---|---|
| 1. 道路施設点検へのロボット技術の導入 |
飛行型ドローン、ボート型ドローン「フレモラ」*1、クローラ型ロボット*2 |
| 2. マネジメントへのDX導入 |
インフラデータ管理システム「inMap®」*3、360度画像を用いて3次元空間を作成する「360EDITOR (EJEC ver)」*4、 3次元計画可視化ツール「Eye-Con360®」*5 |
| 3. AIシステムの開発 |
災害被災者及び獣害(クマ)検知AIシステム*6 |
| 4. その他 |
Gaussian Splattingによるデジタルツイン技術 |

技術説明を行うファノベイトラボのメンバー
技術説明を行うファノベイトラボのメンバー
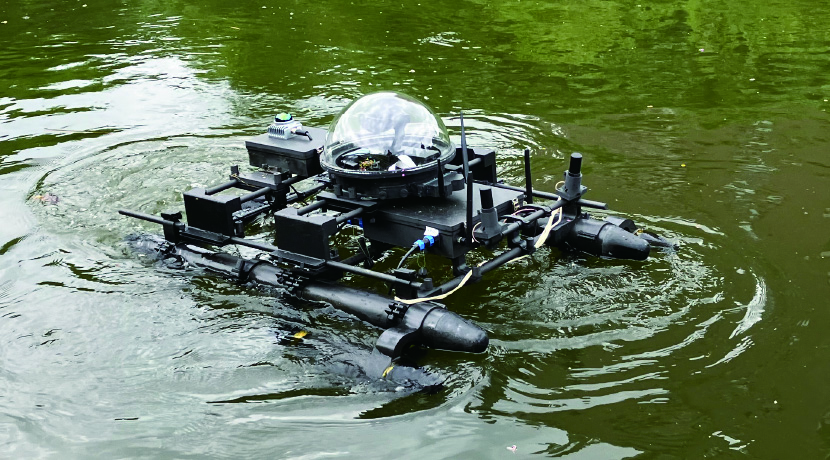
*1:ボート型ドローン「フレモラ」 リーフレット掲載ページはこちら
暗渠や河川・港湾施設など「閉鎖・危険空間」における調査のための自律航行型(または遠隔操作型)ボート型ドローンです。人による作業が困難な環境でも、高精度なセンサーで構造物や地形のデータを安全かつ効率的に取得します。
暗渠や河川・港湾施設など「閉鎖・危険空間」における調査のための自律航行型(または遠隔操作型)ボート型ドローンです。人による作業が困難な環境でも、高精度なセンサーで構造物や地形のデータを安全かつ効率的に取得します。

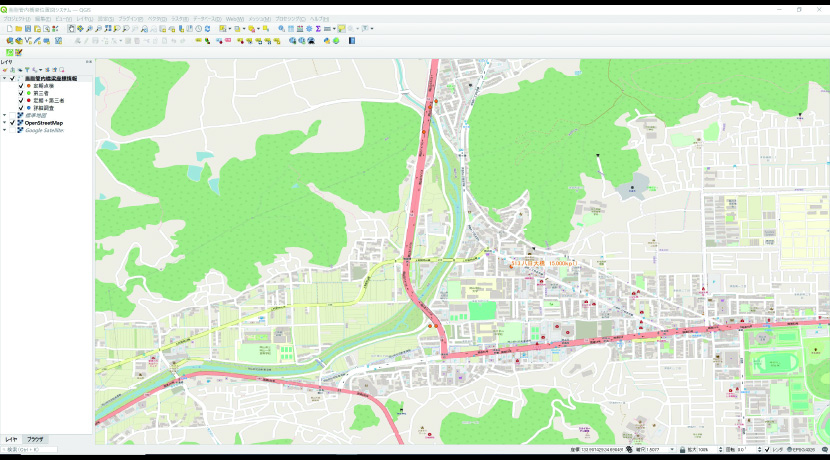
*3:インフラデータ一元管理システム「inMap®」 リーフレット掲載ページはこちら
デジタル化した膨大なインフラデータと位置情報を地図上で一元管理し、必要な情報へ素早くアクセスできる、検索性に優れた情報共有システムです。
デジタル化した膨大なインフラデータと位置情報を地図上で一元管理し、必要な情報へ素早くアクセスできる、検索性に優れた情報共有システムです。
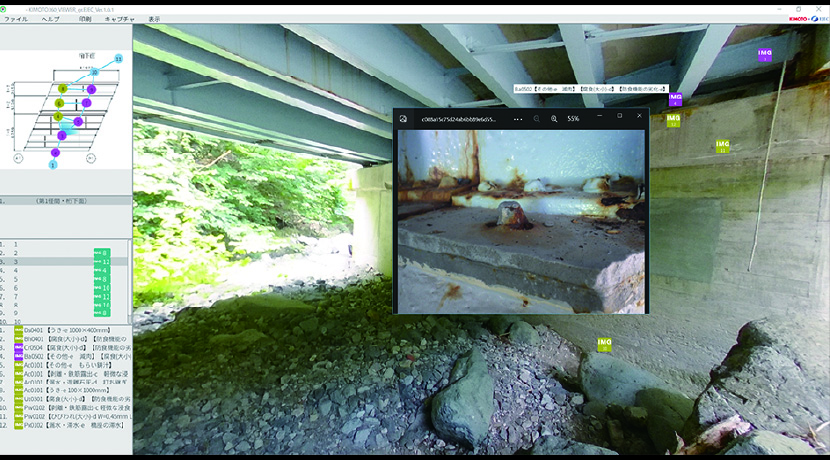
*4:パノラマ空間共有システム「360 EDITOR(EJEC ver.)」 リーフレット掲載ページはこちら
全天球写真を組み合わせた3D空間により、ストリートビューのような操作感でPC上での現地確認を可能にするシステムです。損傷写真や点検調書などの各種ファイルを空間内にひも付けて管理・参照できます。
全天球写真を組み合わせた3D空間により、ストリートビューのような操作感でPC上での現地確認を可能にするシステムです。損傷写真や点検調書などの各種ファイルを空間内にひも付けて管理・参照できます。
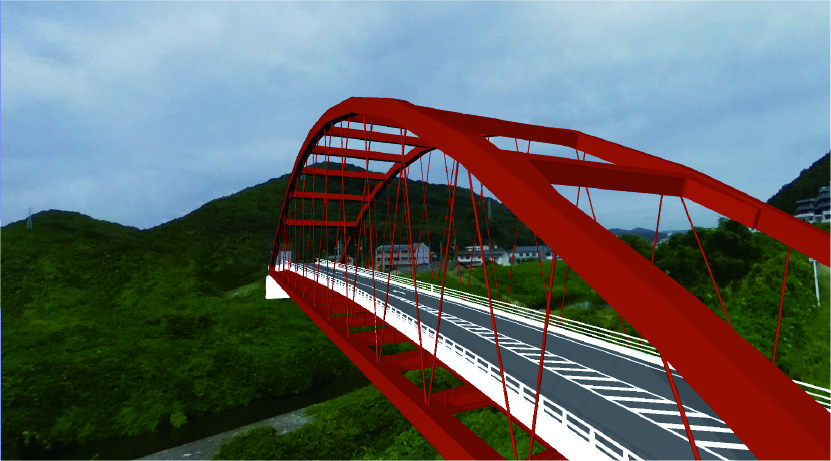
*5:3Dパノラマ空間合意形成支援システム「Eye-Con360®」 リーフレット掲載ページはこちら
360度全天球写真と構造物の3Dデータを重ね合わせ、現地の状況に即した完成イメージを可視化するシステムです。計画段階での迅速な意思決定や、災害復旧における的確な対策立案を強力にバックアップします。
360度全天球写真と構造物の3Dデータを重ね合わせ、現地の状況に即した完成イメージを可視化するシステムです。計画段階での迅速な意思決定や、災害復旧における的確な対策立案を強力にバックアップします。
*6:災害被災者及び獣害(クマ)検知AIシステム
赤外線カメラ搭載ドローンとAIを組み合わせ、被災者や野生動物を自動検知するシステムです。取得した位置情報を消防や警察等の関係機関へリアルタイムに共有することで、迅速な救助活動や安全確保を支援します。
赤外線カメラ搭載ドローンとAIを組み合わせ、被災者や野生動物を自動検知するシステムです。取得した位置情報を消防や警察等の関係機関へリアルタイムに共有することで、迅速な救助活動や安全確保を支援します。

 株式会社エイト日本技術開発
株式会社エイト日本技術開発- 最新情報
- トピックス
- 関東道路メンテナンスセンターの「技術力向上セッション」にて 当社技術を紹介

 株式会社エイト日本技術開発
株式会社エイト日本技術開発